Słowniczek – łatwe wyjaśnienie technicznych terminów pomiarowych
Bardzo niska temperatura / Temperatura kriogeniczna
Technologia niskotemperaturowa (również technologia kriogeniczna lub kriogenika) zajmuje się generowaniem bardzo niskich temperatur poniżej -150 °C. Technologia niskotemperaturowa symuluje zastosowania w przestrzeni kosmicznej w celu oceny wpływu temperatury na materiały. W tym celu stosuje się pojemnościowe czujniki przemieszczenia, które oferują wysoką stabilność temperaturową. Czujniki te wykonują pomiary odległości z nanometrową rozdzielczością. Pola magnetyczne lub środowiska próżniowe nie mają wpływu na czujniki pojemnościowe, co umożliwia osiągnięcie niezwykle wysokiej stabilności sygnału i rozdzielczości.
Błąd kwantyzacji
W przypadku konwersji A/D konwerter ma skończoną rozdzielczość. Dlatego przekonwertowany sygnał ma ograniczoną dokładność, z jaką można go odtworzyć. Różnica między oryginalnym sygnałem analogowym a odtworzonym sygnałem cyfrowym o wartości dyskretnej jest znana jako błąd kwantyzacji.
Bolometr
Bolometry wykorzystują zależność oporu elektrycznego od temperatury. Czuły element składa się z rezystora, który zmienia się, gdy pochłania ciepło. Zmiana rezystancji prowadzi do zmiany napięcia sygnału. Materiał powinien mieć wysoki współczynnik temperaturowy oporu elektrycznego, aby pracować z wysoką czułością i wysoką specyficzną wykrywalnością. Bolometry pracujące w temperaturze pokojowej wykorzystują współczynnik temperaturowy rezystorów metalicznych (np. bolometr czarny i cienkowarstwowy) oraz rezystorów półprzewodnikowych (np. bolometr termistorowy).
capaNCDT
„pojemnościowy bezkontaktowy przetwornik przemieszczenia”
Pojemnościowe czujniki przemieszczenia opierają się na zasadzie idealnego kondensatora płytkowego. Pojemnościowe czujniki przemieszczenia mierzą również w stosunku do izolatorów. Zasada pojemnościowa została znacznie rozwinięta przez Micro-Epsilon; technologia pierścienia ochronnego i pomiar bez uziemienia to innowacje opracowane przez Micro-Epsilon.

Charakterystyka
Charakterystyka czujnika opisuje związek między mierzoną wielkością fizyczną a wynikową wielkością elektryczną. Przebieg charakterystyki jest idealnie liniowy.
Ciało czarne
Ciało czarne to grzejnik, który pochłania całe promieniowanie przychodzące. Nie wykazuje ani odbicia, ani przepuszczalności. Ciało czarne emituje maksymalną możliwą energię przy każdej długości fali. Koncentracja promieniowania nie zależy od kątów. Ciało czarne jest podstawą do zrozumienia fizycznych podstaw bezdotykowego pomiaru temperatury i kalibracji termometrów na podczerwień. Wydrążone ciało termiczne ma mały otwór na jednym końcu. Jeśli ciało jest ogrzewane i osiąga określoną temperaturę, wewnątrz wydrążonego pomieszczenia rozprzestrzenia się zrównoważona temperatura. Otwór emituje idealne czarne promieniowanie o tej temperaturze.

Czas narastania
Czas narastania to czas wymagany przez sygnał wyjściowy do zwiększenia poziomu sygnału z 10% do 90%. W przypadku cyfrowych urządzeń pomiarowych jest to czas wymagany do uzyskania stabilnej wartości pomiaru.
Czas reakcji
Czas reakcji to okres od momentu wystąpienia zdarzenia do wyjścia sygnału. Czas reakcji uznaje się za osiągnięty, gdy osiągnięte zostanie 90% sygnału wyjściowego.
Częstotliwość pomiaru
Częstotliwość aktualizacji wyniku pomiaru. Odzwierciedla liczbę pomiarów w określonym czasie (typowo 1s). Jednostka: 1 / s, herc, Hz. Częstotliwość pomiaru >= częstotliwość wyjściowa.
Czujnik magnetoindukcyjny, MDS
Wewnątrz czujnika zmiana przenikalności, która jest wykrywana przez cewkę czujnika, jest wywoływana przez magnes na obiekcie pomiarowym. Zmiana przenikalności jest liniowo proporcjonalna do kierunku ruchu magnesu, przy czym jej skala jest mniejsza niż skala ruchu. W zależności od siły pola magnetycznego, możliwy jest również pomiar z większej odległości.
MDS jest skrótem od „Magnetic Displacement Sensors”.

Czujnik wysokotemperaturowy / odporny na wysoką temperaturę
Granica wysokiej temperatury nie jest jasno określona. Ogólnie przyjmuje się, że wysoka temperatura zaczyna się od około 180°C. Czujniki, które precyzyjnie mierzą w tak wysokich temperaturach, należą do kategorii czujników wysokotemperaturowych. Zwykle mają one specjalną konstrukcję czujnika z materiałów i komponentów odpornych na temperaturę.
Czujniki laserowe
Czujnik laserowy emituje plamkę lasera na obiekt pomiarowy. Odbite światło pada na element odbiorczy pod pewnym kątem w zależności od odległości. Na podstawie położenia plamki światła na elemencie odbiorczym i odległości od nadawcy do elementu odbiorczego w czujniku obliczana jest odległość do obiektu pomiarowego.
Czujniki linkowe
Czujniki linkowe mierzą ruchy liniowe za pomocą bardzo elastycznego drutu stalowego. Drut jest nawinięty na bęben, którego oś jest sprzężona z potencjometrem lub enkoderem. Koniec drutu jest przymocowany do obiektu pomiarowego. Ruch obrotowy bębna jest wytwarzany, gdy następuje zmiana odległości obiektu pomiarowego od czujnika. Ten ruch obrotowy jest przekształcany na sygnał elektryczny i wyprowadzany za pomocą enkodera lub potencjometru.

Czujniki odległości
Czujniki odległości to liniowe czujniki pomiarowe, które wysyłają sygnał dla określonej odległości lub pozycji. Czujniki odległości są zatem czujnikami położenia lub przemieszczenia.
Czujniki optyczne
Ta zasada pomiaru wykorzystuje efekty w dziedzinie optyki. Odnosi się to do pomiaru czasu przelotu, triangulacji laserowej, pomiaru konfokalnego lub pomiaru zgodnie z zasadą cieniowania/ThruBeam.
Czujniki przemieszczenia
Czujniki przemieszczenia to liniowe czujniki pomiarowe, które wysyłają sygnał reprezentujący określoną odległość lub określoną pozycję w odniesieniu do obiektu pomiarowego. Czujniki przemieszczenia są zatem również czujnikami odległości, zasięgu lub położenia.
Czułość
Zmiana wartości wielkości wyjściowej urządzenia pomiarowego odniesiona do zmiany wartości wielkości wejściowej, która ją powoduje, patrz DIN 1319-1. W przypadku pojemnościowego czujnika przemieszczenia, czułość 5V/mm oznacza, że zmiana przemieszczenia o 1 mm w zakresie pomiarowym powoduje zmianę napięcia wyjściowego o 5V.
eddyNCDT
„Bezkontaktowy przetwornik przemieszczenia zgodnie z zasadą prądów wirowych”.
Czujniki z grupy eddyNCDT działają zgodnie z zasadą prądów wirowych. Są one używane do małych zakresów pomiarowych i do celów przewodzących prąd elektryczny. Na technologię prądów wirowych duży wpływ miała firma Micro-Epsilon. Wytrzymałe, ale mimo to wysoce precyzyjne modele czujników nie mają sobie równych na całym świecie. Szczególnie miniaturowe czujniki są wyjątkowe ze względu na ich niezwykle małą konstrukcję.

Elektroda ochronna
Elektroda ochronna, znana również jako pierścień ochronny, otacza aktywny obszar pomiarowy pojemnościowego czujnika przemieszczenia. Elektroda ochronna zapewnia jednorodne pole elektryczne aż do krawędzi aktywnego obszaru pomiarowego czujnika – warunek wstępny dla pojemnościowej zasady pomiaru przemieszczenia.

ICONNECT
Oprogramowanie ICONNECT firmy Micro-Epsilon to łatwe w użyciu środowisko programistyczne do szybkiego i wizualnego tworzenia aplikacji przemysłowych. ICONNECT jest używany w następujących obszarach:
- Akwizycja danych
- Sterowanie
- Automatyzacja
- Kontrola jakości
- Przetwarzanie obrazu
- Badania i rozwój oraz
- Edukacja
induSENSORS
Grupa produktów czujników indukcyjnych firmy Micro-Epsilon. Opis serii produktów:
Seria VIP:
Bezzużyciowy indukcyjny czujnik potencjometryczny
– Bezdotykowy czujnik z pierścieniem pomiarowym i zintegrowaną elektroniką
Seria EDS:
Przetwornik przemieszczenia wiroprądowy
– Czujnik o długim skoku dla hydrauliki i pneumatyki
Seria LVP:
Liniowy zmiennopotencjometryczny
– Czujnik z trzpieniem pomiarowym i zintegrowaną elektroniką
Seria LIP:
Liniowy indukcyjny potencjometryczny
– Liniowy przetwornik przemieszczenia z trzpieniem pomiarowym
Seria LVDT:
Liniowy przetwornik o zmiennym przemieszczeniu
– Czujniki pomiarowe i przemieszczenia z zewnętrzną elektroniką
Kompensacja temperatury
Elementy mechaniczne i elektroniczne systemu pomiarowego są zależne od temperatury. Możliwe jest zredukowanie tych elementów do minimum poprzez konstruktywne działania i wybór odpowiednich materiałów i części. Aby zmniejszyć wpływ temperatury na wynik pomiaru, często stosuje się tak zwaną kompensację temperatury. W tym celu odchylenia pomiarowe spowodowane wahaniami temperatury są określane w fabryce w celu odpowiedniego dostosowania czujnika, co kompensuje wpływ temperatury na sygnał.
Konfokalny chromatyczny
W optyce, dwie soczewki (lub zakrzywione zwierciadła) są ułożone konfokalnie względem siebie, gdy ich ogniska się pokrywają. Zgodnie z zasadą konfokalnego pomiaru chromatycznego, białe światło jest dzielone na różne widma za pomocą soczewek i skupiane na obiekcie za pomocą wieloobiektywowego układu optycznego. Soczewki są rozmieszczone w taki sposób, że światło jest rozbijane przez kontrolowaną aberrację chromatyczną na monochromatyczne długości fal zależne od przemieszczenia.
Laserowa metoda triangulacji
Skanery laserowe firmy Micro-Epsilon – często określane jako czujniki profilu – wykorzystują zasadę triangulacji laserowej do dwuwymiarowego wykrywania profilu na różnych powierzchniach docelowych. Dzięki zastosowaniu specjalnych soczewek, wiązka lasera jest powiększana w celu utworzenia statycznej linii laserowej i rzutowana na powierzchnię docelową. System optyczny rzutuje rozproszone światło odbite od tej linii laserowej na bardzo czułą matrycę czujnika. Na podstawie obrazu z matrycy, kontroler oblicza informacje o odległości (oś z) i pozycji wzdłuż linii lasera (oś x). Te zmierzone wartości są następnie wyświetlane w dwuwymiarowym układzie współrzędnych, który jest ustalony w odniesieniu do czujnika. W przypadku poruszających się obiektów lub przemieszczającego się czujnika możliwe jest zatem uzyskanie wartości pomiarowych 3D.

Liniowość
Maksymalne odchylenie między idealną charakterystyką prostoliniową a rzeczywistą charakterystyką jest określane jako nieliniowość lub liniowość. Wartość ta jest podawana jako procent zakresu pomiarowego (% FSO).
LVDT, liniowy zmienny transformator różnicowy
Ta nazwa opisuje metodę indukcyjnego pomiaru przemieszczenia, w której uzwojenia pierwotne są zasilane stałym napięciem przemiennym. Uzwojenia pierwotne wytwarzają zmienne pole, indukując sygnał w cewkach wtórnych, którego siła zależy od położenia rdzenia.
Nieliniowość
Maksymalne odchylenie między idealną charakterystyką prostoliniową a rzeczywistą charakterystyką jest określane jako nieliniowość lub liniowość. Wartość ta jest podawana jako procent zakresu pomiarowego (% FSO).
Obiekt pomiarowy
Obiekt pomiarowy to ciało, którego ruch, położenie, wymiary lub temperatura mają być mierzone przez czujnik.
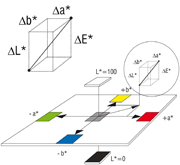
Odległość kolorów
Aby zmierzyć różnicę między dwoma kolorami, różnica ta jest przypisywana do odległości w przestrzeni kolorów. W przestrzeni kolorów opartej na metodzie równej odległości różnicę kolorów ∆E można określić na podstawie odległości między miejscami kolorów:
ΔE = √ (L*₁-L*₂)² + (a*₁-a*₂)² + (b*₁-b*₂)².
Zgodnie z normą DIN 53218, Delta E ma następujące znaczenie:
0: Brak różnicy kolorów
1: Niewielka różnica kolorów
2: Mała różnica kolorów
3: Średnia różnica kolorów
4: Duża różnica kolorów
5: Bardzo duża różnica kolorów
W przemysłowych pomiarach kolorów różnice kolorów między 0 a 1 często odgrywają ważną rolę.
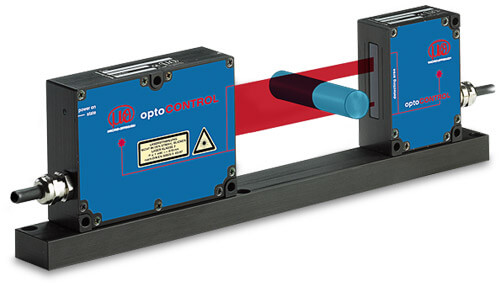
optoCONTROL
Mikrometry optyczne, które określają wymiar i położenie obiektu pomiarowego w sposób bezdotykowy zgodnie z zasadą pomiaru cienia lub ilości światła.
optoNCDT
„optyczny bezkontaktowy przetwornik przemieszczenia”.
optoNCDT ILR: Czujniki te mierzą bezdotykowo zgodnie z zasadą czasu przelotu.
optoNCDT 1xxx / 22xx: Czujniki te mierzą bezdotykowo z wykorzystaniem triangulacji laserowej.
optoNCDT 24xx: Technika opiera się na zasadzie chromatycznej konfokalnej.

Pasmo przenoszenia
Pasmo przenoszenia to częstotliwość, przy której sygnał wyjściowy spada do 71% (-3dB) wartości maksymalnej.
Pola magnetyczne z czujnikami indukcyjnymi
Pole magnetyczne nie ma wpływu na czujniki wiroprądowe z cewką indukcyjną z rdzeniem powietrznym. Pole magnetyczne może natomiast modyfikować właściwości obiektu pomiarowego, a tym samym pośrednio wpływać na pomiar za pomocą czujników wiroprądowych. Czujniki wykorzystujące rdzeń, takie jak LVDT lub induSENSOR serii LVP, mogą podlegać wpływowi pola magnetycznego, ponieważ przenikalność rdzenia może zmieniać się pod wpływem pola magnetycznego. Wpływowi temu można zapobiec lub znacznie go ograniczyć, stosując odpowiednie środki ostrożności podczas montażu czujnika.”
Potencjometr
Potencjometr to bezstopniowy obrotowy lub przesuwny element oporowy. Potencjometr jest często używany jako liniowy rezystor lub liniowy dzielnik napięcia. Jest on używany jako element czujnikowy w czujnikach linkowych. Innym praktycznym przykładem zastosowania jest regulacja głośności w radiu.
Powtarzalność
Ilościowa specyfikacja odchylenia wzajemnie niezależnych pomiarów, które są określane w tych samych warunkach.
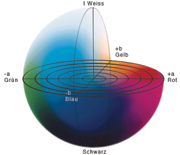
Przestrzeń kolorów Lab
Przestrzeń kolorów Lab obejmuje wszystkie kolory postrzegane przez ludzkie oko. W tym modelu kolorów 3D oś L jest korelacją jasności, oś a odnosi się do czerwieni i zieleni, podczas gdy oś b opisuje kolory od niebieskiego do żółtego. Przestrzeń kolorów Lab służy jako model niezależny od urządzenia. Kolory są definiowane niezależnie od metody ich produkcji i techniki wyjściowej. Przestrzeń kolorów Lab jest ułożona w równych odstępach, tj. im większa różnica między kolorami w przestrzeni kolorów, tym wyraźniej różnica może być postrzegana przez ludzkie oko.
Przesunięcie (offset)
Elektryczny punkt zerowy wyjścia nieobciążonego czujnika zwykle nie jest równy zeru. To przesunięcie punktu zerowego nazywane jest offsetem.
Przetwornik przemieszczenia bezwzględnego
Przetwornik przemieszczenia bezwzględnego mierzy odległość do obiektu i dostarcza sygnał proporcjonalny do przemieszczenia. Przetworniki te opierają się na różnych zasadach fizycznych.
Rozdzielczość
Rozdzielczość opisuje najmniejszą możliwą zmianę wielkości, którą można wiarygodnie zmierzyć za pomocą czujnika. W praktyce rozdzielczość jest określana przez stosunek sygnału do szumu, biorąc pod uwagę uzyskane widmo częstotliwości.
RTSC
Unikalna cecha optoNCDT 1700 i 2300. Dzięki tej funkcji stopień odbicia od obiektu pomiarowego jest kompensowany podczas trwającej ekspozycji i w czasie rzeczywistym. Oznacza to, że nawet przy zmianie powierzchni z czarnej na białą sygnał nie wykazuje nagłych zmian ani błędnych danych.
RTSC to skrót od „Real Time Surface Compensation”.
scanCONTROL
Systemy pomiarowe znane również jako laserowe skanery liniowe. Wykorzystując triangulację, profil powierzchni obiektu pomiarowego jest replikowany przez linię laserową (światło lasera)

Stabilność długoterminowa
Pomimo zastosowania wysokiej jakości komponentów, stabilność czujników lub systemów pomiarowych może zmieniać się w czasie, tj. przy niezmienionej wielkości wejściowej i warunkach otoczenia rejestrowana jest możliwa zmiana sygnału wyjściowego w określonym czasie. Zazwyczaj podawana w % FSO/miesiąc.
Stabilność temperatury
Stabilność temperaturowa wskazuje procentowy możliwy błąd pomiaru na jednostkę (K lub °C). Błąd ten można przypisać fizycznej rozszerzalności wbudowanych komponentów lub wpływowi temperatury na komponenty elektroniczne. Efekt ten powoduje niewielkie odchylenie wyników w różnych temperaturach. Stabilność temperaturowa ma decydujące znaczenie dla zapewnienia dokładności pomiaru, szczególnie w zastosowaniach przemysłowych z dużymi wahaniami temperatury.
Stała sprężyny
W przypadku czujników pomiarowych LVDT stała sprężyny umożliwia pomiar siły pomiarowej, z jaką tłok styka się z mierzonym obiektem. Siła przywracająca sprężyny jest proporcjonalna do ugięcia.
Standardowy obserwator
Ludzie postrzegają kolory w różny sposób. Aby osiągnąć jednolitość percepcyjną, Międzynarodowa Komisja Oświetlenia (CIE) określa funkcje ważenia widmowego. Funkcje te opisują sposób, w jaki ludzie postrzegają kolory.
Są one oparte na eksperymentalnie określonych krzywych czułości stożka długofalowego L (X), stożka średniofalowego M (Y) i stożka krótkofalowego S (Z). Receptory kolorów (czopki) na ludzkiej siatkówce znajdują się w obrębie 2° łuku dołka na tzw. plamce żółtej. W oparciu o tę percepcję, CIE wprowadziło standardowy system kolorymetryczny w 1931 roku. Ponieważ receptory natężenia światła (komórki pręcikowe) są również odpowiedzialne za ludzką wrażliwość na kolory, system został uzupełniony w 1964 r. o pole widzenia 10°.
Dlatego też istnieją dwie funkcje ważenia. Jedna dla małych pól widzenia (standardowy obserwator 2°) odpowiada wielkości znaczka pocztowego na końcu wyciągniętej ręki. Druga dla większych pól widzenia (10°) odpowiada rozmiarowi pocztówki na końcu wyciągniętej ręki.
Stosunek sygnału do szumu
Jakość przesyłanego sygnału użytecznego można określić za pomocą stosunku sygnału do szumu. Szum pojawia się przy każdej transmisji danych. Im wyższa separacja między szumem a sygnałem użytecznym, tym bardziej stabilna może być rekonstrukcja przesyłanych informacji z sygnału. Jeśli podczas próbkowania cyfrowego moc szumu i moc sygnału użytecznego zbliżą się zbytnio, może zostać wykryta nieprawidłowa wartość, a informacje mogą zostać uszkodzone. SNR jest obliczany przez podzielenie średniej mocy użytecznej przez średnią moc szumu.
Szum
Sygnał zakłócający, który nakłada się na sygnał wyjściowy. Obniża jakość sygnału wyjściowego i występuje wszędzie tam, gdzie sygnały są wzmacniane, mierzone lub przesyłane. Szum powstaje na przykład w rezystancji elektrycznej z powodu ruchu atomów wynikającego z wpływu temperatury lub w półprzewodnikach z powodu tworzenia i eliminacji nośników ładunku (tworzenie par i rekombinacja). Szum jest klasyfikowany za pomocą widmowej gęstości mocy, tj. mocy szumu w nieskończenie małej szerokości pasma. W inżynierii sygnały szumu, takie jak szum różowy, są wykorzystywane do oceny komponentów akustycznych.
Szybkość transmisji
Określa liczbę symboli przesyłanych w ciągu jednej sekundy. Jednostką jest Baud (w skrócie Bd) lub 1/s. Jeśli symbol odpowiada jednemu bitowi, szybkość transmisji jest równa szybkości bitowej.
Średnia
Średnia lub filtr średniej odpowiada średniej arytmetycznej/średniej.
Średnia = 1/n*(x1+x2+x2+…+xn). W przypadku triangulacji linii laserowej filtr ten służy do „wygładzania” profili. Do pewnego stopnia szumy są tłumione. Znacznie odbiegające wartości wyraźnie zmieniają wynik.
Przykład: 3;5;6;10;27 –> Średnia = 10,2 . Jeśli wartość odstająca „27” powinna być mniej brana pod uwagę w wynikach, wartości można skorygować za pomocą filtra średniej
Średnica obiektu pomiarowego
Minimalna wymagana powierzchnia docelowa dla indukcyjnych i pojemnościowych czujników przemieszczenia dla udanego pomiaru przemieszczenia. Średnica obiektu docelowego jest zazwyczaj proporcjonalna do średnicy zewnętrznej czujnika.
Temperatura odniesienia
Wartość temperatury do porównania z regularnymi danymi pomiarowymi.
Tensometr
Tensometr określa odkształcenie lub ściskanie obiektu pomiarowego poprzez zmianę rezystancji. Tensometr składa się z folii nośnej, na którą nałożono materiał oporowy w kształcie meandra. Zazwyczaj jest ona pokryta folią w celu ochrony przed uszkodzeniami mechanicznymi. Tensometr jest połączony z mierzonym ciałem. Materiałem oporowym może być między innymi krzem, platyna lub konstantan.
thermoMETER
Rodzina produktów czujników temperatury na podczerwień firmy Micro-Epsilon. Grupa produktów obejmuje:
thermoMETER CT
thermoMETER CS
thermoMETER CTlaser
thermoMETER CX
thermoMETER CTratio

Triangulacja laserowa
Triangulacja oznacza pomiar odległości poprzez obliczenie kąta. W technologii pomiarowej czujnik rzutuje plamkę lasera na obiekt pomiarowy. Odbite światło pada na element odbiorczy pod pewnym kątem w zależności od odległości. Na podstawie położenia plamki świetlnej na elemencie odbiorczym i odległości od nadawcy do elementu odbiorczego w czujniku obliczana jest odległość do obiektu pomiarowego.
Twierdzenie o próbkowaniu
W przypadku konwersji A/D należy wziąć pod uwagę twierdzenie o próbkowaniu. Jest to konieczne w celu odtworzenia sygnału najbardziej zbliżonego do oryginalnego sygnału po konwersji C/A. Obowiązuje następująca zasada: Częstotliwość próbkowania musi być co najmniej dwukrotnie większa od częstotliwości sygnału, a próbkowany sygnał musi być ograniczony przez filtr dolnoprzepustowy.
wireSENSOR
Kontaktowe czujniki linkowe firmy Micro-Epsilon umożliwiają pomiar w zakresie od 50 mm do 50 m.
Wyjście cyfrowe
Wyjście cyfrowe dostarcza sygnał o dyskretnej wartości, ale niekoniecznie dyskretny w czasie, którego stany wyjściowe są ograniczone w układzie logicznym do dwóch wartości. Informacje są przesyłane zakodowane za pomocą pojedynczych bitów (poziomy „wysoki” i „niski”). Umożliwia to większą szybkość transmisji danych, mniejsze straty i większy zasięg.
Zabezpieczenie przed odwrotną polaryzacją
Dioda szeregowa umieszczona za zaciskiem napięcia zasilania zapobiega przepływowi prądu, a tym samym uszkodzeniu dalszych elementów elektronicznych, gdy napięcie zasilania jest nieprawidłowo przyłożone (odwrócone). Zabezpieczenie przed odwróceniem polaryzacji jest również realizowane za pomocą równoległej diody podłączonej odwrotnie do napięcia roboczego i szybkiego bezpiecznika.
Zakres pomiarowy
Zakres pomiarowy opisuje przestrzeń czujnika, w której musi znajdować się mierzony obiekt, aby spełnione były określone dane techniczne. Skrajne obszary tej przestrzeni są określane jako początek i koniec zakresu pomiarowego. Niektóre czujniki wykazują przestrzeń (por. początek zakresu pomiarowego) pomiędzy zakresem pomiarowym a czujnikiem. W przypadku czujników kontaktowych zakres pomiarowy to odległość między mechanicznie minimalną i maksymalną możliwą odległością montażu czujnika od obiektu pomiarowego.

Zasada pomiaru czasu przelotu
Zgodnie z zasadą pomiaru czasu propagacji światła, dioda laserowa w czujniku wytwarza krótki impuls laserowy, który jest rzutowany na obiekt pomiarowy. Światło odbite od obiektu pomiarowego jest wykrywane przez element czujnika. Odległość pomiarowa wynika z czasu propagacji impulsu świetlnego do obiektu pomiarowego i z powrotem.